Fue desarrollada por investigadores del MIT de Estados Unidos y la EPFL de Suiza. Por qué es ideal para tareas en la industria, rescate y exploración en zonas de difícil acceso

El diseño simétrico permite a los robots superar las fallas de la mano humana/MIT - EPFL
infobae.com
21 Ene, 2026
Una mano robótica que se “sale” del brazo, se arrastra sola y recoge objetos parece sacada de una película, pero ya existe.
El resultado principal de una investigación realizada por científicos del Instituto de Tecnología de Massachusetts (MIT) en los Estados Unidos y del Instituto Federal Suizo de Tecnología (EPFL), en Lausana, Suiza, es un diseño que permite a la mano robótica moverse sin ayuda y tomar varios objetos fuera del alcance habitual.
Esta innovación promete transformar la manipulación de objetos en fábricas, servicios y misiones de exploración.
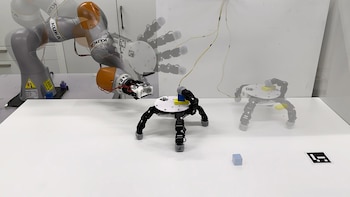
La mano robótica desmontable del MIT y EPFL logra moverse sola y recoge objetos fuera del alcance habitual. Marcará un hito en la robótica industrial/ Xiao Gao
El avance abre la puerta a tareas que antes resultaban imposibles para los robots, como recoger cosas en rincones inaccesibles o manipular varios objetos seguidos.
Según los científicos que la desarrollan, “la mano puede recuperar hasta tres objetos de forma secuencial y volver a acoplarse mientras mantiene un agarre seguro sobre los objetos”. Se publicó en la revista Nature Communications.
Robots con manos que se animan a más

Las manos robóticas suelen imitar la forma humana, pero comparten limitaciones como el alcance restringido y la dificultad para tomar objetos desde ambos lados./Archivo REUTERS/Guglielmo Mangiapane
Los investigadores habían notado que la mayoría de las manos robóticas imitan a la humana, pero heredan defectos: la asimetría limita el agarre y obliga a usar los dedos de un solo lado.
Esta limitación complica tomar varios objetos a la vez o moverse en espacios reducidos, porque el brazo tampoco ayuda mucho: el alcance está “estrictamente limitado por el rango del brazo”.
El equipo también explicó que la falta de reversibilidad implica que, para un segundo agarre, la mano y el brazo tienen que reorientarse por completo.
Esto vuelve lento y poco eficiente cualquier intento de manipular objetos en distintas posiciones o direcciones.

El objetivo del estudio fue crear una mano robótica con estructura simétrica y capacidad de desplazarse por sí misma para superar las limitaciones de diseño de las manos tradicionales. Archivo Jimena Del Piccolo
El objetivo fue claro: inventar una mano robótica que no dependa de la anatomía humana.
El desafío consistió en lograr un diseño simétrico y desmontable que hiciera posible tomar objetos desde cualquier lado y operar en áreas donde un brazo normal no funciona.
Cómo crearon la mano que se arrastra sola

La nueva mano robótica del estudio está fabricada con materiales ligeros y componentes electrónicos avanzados. (Archivo /Imagen Ilustrativa Infobae)
El grupo de investigadores diseñó dos modelos de mano robótica, uno con cinco dedos y otro con seis.
Ambas versiones cuentan con una palma de 16 centímetros de diámetro y una estructura completamente simétrica. Así, cualquier par de dedos puede realizar el mismo tipo de agarre, sin importar el lado.
La mano puede separarse de la base del brazo y desplazarse por superficies para buscar objetos.
Esta función la distingue de cualquier otra innovación previa y permite acceder a rincones donde un robot fijo no llega.
El diseño permite tareas como recuperar objetos fuera del alcance normal y manipular varios objetos.

Las nuevas manos robóticas podrían emplearse en rescates durante catástrofes y derrumbes para acceder y recuperar objetos en espacios difíciles. (Imagen ilustrativa Infobae)
Durante los experimentos, la mano recogió hasta tres objetos de manera consecutiva y logró volver a acoplarse al brazo sin soltar ninguno.
Se pusieron a prueba objetos cotidianos como tubos de cartón, pelotas de goma, marcadores y latas metálicas. “La mano puede sostener de forma segura varios tipos de objetos cotidianos”, confirmaron los científicos.
El dispositivo replicó 33 tipos diferentes de agarre humano y soportó objetos de hasta 2 kilogramos. Esta versatilidad marca una diferencia frente a los modelos previos, que solo podían manejar un rango muy limitado de formas y pesos.

La mano humana tiene una estructura asimétrica que limita su capacidad de agarre y alcance en ciertas tareas. (Imagen Ilustrativa Infobae)
El equipo comprobó que la arquitectura simétrica ayuda a superar los límites de las manos robóticas tradicionales y de la mano humana.
Ahora, la manipulación de objetos en lugares estrechos o de difícil acceso resulta mucho más simple para los robots.
Limitaciones y próximos pasos

La nueva mano robótica aún debe probarse con objetos de distintos tamaños, pesos y en escenarios reales. (Archivo Imagen Ilustrativa Infobae)
El diseño todavía enfrenta retos: es necesario probar la mano con objetos más grandes, pesados o de formas inusuales.
El dispositivo debe adaptarse a las necesidades de industrias variadas para demostrar su utilidad fuera del laboratorio.
“La investigación futura puede explorar aplicaciones potenciales para esta tecnología, como acceder y realizar tareas en espacios confinados”, adelantaron los investigadores.
El equipo sugiere que el próximo paso será llevar la mano robótica a tareas reales donde los robots tradicionales no pueden operar.
Concluyeron que la mano robótica desmontable y simétrica representa un cambio de paradigma para la robótica moderna.
El avance amplía las posibilidades de intervención en industria, servicios y exploración, y abre una nueva etapa para la interacción entre robots y el entorno.
________
Fuente:





